三(sān)維點(diǎn)雲(yún)實(shí)物(wù)建模
1、地面(miàn)測量型三(sān)維激光(guāng)掃描儀進(jìn)行厂區(qū)、車間(jiān)數據(jù)掃描
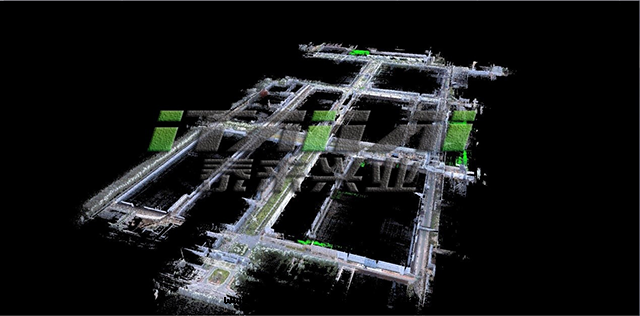
根(gēn)據(jù)現(xiàn)场(chǎng)、設備形狀和(hé)环(huán)境以(yǐ)及(jí)三(sān)維激光(guāng)掃描儀的(de)有(yǒu)效測程合理(lǐ)的(de)布(bù)設掃描儀的(de)架站點(diǎn),然後(hòu)在(zài)每个(gè)站點(diǎn)根(gēn)據(jù)後(hòu)續成(chéng)图(tú)需求設置合适的(de)分(fēn)辨率進(jìn)行掃描。在(zài)掃描过(guò)程中(zhōng),可(kě)以(yǐ)通(tòng)过(guò)架設标(biāo)靶以(yǐ)提(tí)高(gāo)後(hòu)續點(diǎn)雲(yún)拼接的(de)精度(dù)。地面(miàn)掃描我(wǒ)们(men)采用(yòng)的(de)是(shì)FARO330和(hé)Trimble TX5。将全部(bù)站點(diǎn)的(de)掃描數據(jù)导入(rù)到(dào) Trimble Realworks软(ruǎn)件(jiàn)中(zhōng),執行自(zì)動(dòng)拼接命令。 Trimble Realworks软(ruǎn)件(jiàn)自(zì)動(dòng)拼接命令完全不(bù)需要(yào)人(rén)为(wèi)干(gàn)預,可(kě)以(yǐ)簡單、快(kuài)捷的(de)得到(dào)高(gāo)精度(dù)的(de)整體(tǐ)點(diǎn)雲(yún)數據(jù)。
以(yǐ)下(xià)是(shì)車間(jiān)和(hé)厂區(qū)的(de)彩色(sè)點(diǎn)雲(yún):




2、車载(zài)移動(dòng)三(sān)維激光(guāng)掃描儀設備獲取厂區(qū)整个(gè)室(shì)外三(sān)維點(diǎn)雲(yún)數據(jù)
車载(zài)三(sān)維激光(guāng)掃描儀是(shì)将三(sān)維激光(guāng)掃描設備、卫星(xīng)定(dìng)位(wèi)模块(kuài)、慣性(xìng)測量裝(zhuāng)置、里程計(jì)、360°全景相機(jī)、总成(chéng)控制模块(kuài)和(hé)高(gāo)性(xìng)能(néng)闆卡(kǎ)計(jì)算機(jī)集成(chéng)並(bìng)封(fēng)裝(zhuāng)于(yú)汽車的(de)剛性(xìng)平台(tái)之(zhī)上(shàng),在(zài)汽車移動(dòng)过(guò)程中(zhōng),快(kuài)速獲取高(gāo)精度(dù)定(dìng)位(wèi)定(dìng)姿數據(jù)、高(gāo)密度(dù)三(sān)維點(diǎn)雲(yún)和(hé)高(gāo)清(qīng)連(lián)續全景影像數據(jù),通(tòng)过(guò)統一(yī)的(de)地理(lǐ)參考和(hé)摄影測量解(jiě)析處(chù)理(lǐ),實(shí)現(xiàn)無控制的(de)空(kōng)間(jiān)地理(lǐ)信(xìn)息采集與(yǔ)建库。我(wǒ)们(men)采用(yòng)的(de)車载(zài)是(shì)Topcon IP-S2移動(dòng)測量系(xì)統:


3、無人(rén)機(jī)空(kōng)中(zhōng)航測照片(piàn)獲取厂區(qū)空(kōng)中(zhōng)三(sān)維模型點(diǎn)雲(yún)數據(jù)
無人(rén)機(jī)是(shì)利用(yòng)無線(xiàn)電(diàn)遙控設備和(hé)自(zì)備的(de)程序控制裝(zhuāng)置的(de)不(bù)载(zài)人(rén)飛機(jī),可(kě)以(yǐ)實(shí)时(shí)、動(dòng)态、大(dà)量采集空(kōng)間(jiān)點(diǎn)雲(yún)信(xìn)息,可(kě)快(kuài)速獲取高(gāo)密度(dù)、高(gāo)精度(dù)的(de)點(diǎn)雲(yún)數據(jù)。無人(rén)機(jī)航測我(wǒ)们(men)采用(yòng)的(de)是(shì)Motoar Sky MS-970,機(jī)身(shēn)采用(yòng)碳纖複合材料及(jí)钛合金(jīn)連(lián)接件(jiàn),翼臂可(kě)折疊,自(zì)輕(qīng)量化(huà),可(kě)搭配2D/3D雲(yún)台(tái),高(gāo)負载(zài)挂接微單、專業單反(fǎn)、紅(hóng)外、激光(guāng)雷(léi)达(dá)等多(duō)種(zhǒng)傳感(gǎn)器,地面(miàn)站全程監控,一(yī)鍵起(qǐ)飛、悬停、返航遙控器、平闆、三(sān)防笔(bǐ)記(jì)本(běn)多(duō)種(zhǒng)控制方(fāng)式。



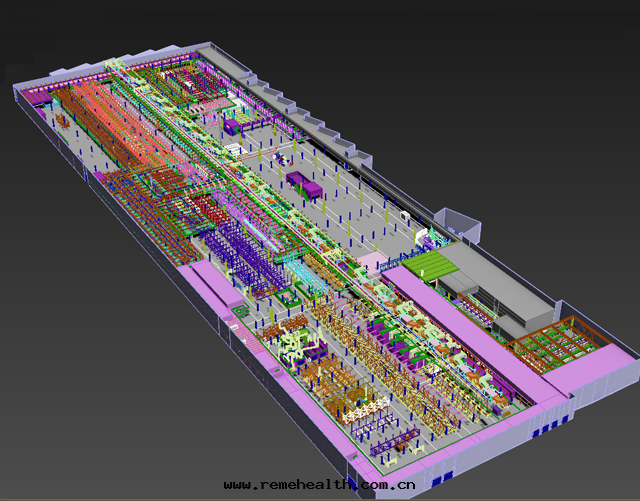
4、利用(yòng)高(gāo)精度(dù)測量設備獲取的(de)數據(jù)創建高(gāo)精度(dù)三(sān)維實(shí)景模型
拼接、去(qù)噪處(chù)理(lǐ)後(hòu)的(de)點(diǎn)雲(yún)在(zài)Trimble Realworks 和(hé)3Dmax软(ruǎn)件(jiàn)中(zhōng),根(gēn)據(jù)點(diǎn)雲(yún)進(jìn)行厂區(qū)和(hé)車間(jiān)的(de)模型建立和(hé)貼图(tú),以(yǐ)达(dá)到(dào)其(qí)真(zhēn)實(shí)性(xìng)。以(yǐ)下(xià)是(shì)車間(jiān)和(hé)厂區(qū)的(de)部(bù)分(fēn)模型:

聲明(míng):本(běn)网(wǎng)站部(bù)分(fēn)的(de)文(wén)章(zhāng)、图(tú)片(piàn)及(jí)材料来(lái)源于(yú)互聯网(wǎng),如(rú)有(yǒu)侵權請聯系(xì)撤删,謝謝!