一(yī)汽佛山(shān)焊裝(zhuāng)車間(jiān)三(sān)維掃描數字(zì)化(huà)
当前(qián)我(wǒ)國(guó)産業升(shēng)級換代(dài)加快(kuài),國(guó)內(nèi)化(huà)工厂及(jí)企業需要(yào)对(duì)厂房(fáng)進(jìn)行改造擴建,需要(yào)拆除、更(gèng)換、新(xīn)增大(dà)量的(de)設備和(hé)管(guǎn)線(xiàn)。而(ér)改擴建設計(jì)質(zhì)量的(de)關(guān)鍵取決于(yú)对(duì)現(xiàn)狀的(de)了(le)解(jiě)程度(dù),現(xiàn)场(chǎng)情(qíng)況複雜,給(gěi)設計(jì)带来(lái)了(le)很大(dà)難度(dù),所(suǒ)以(yǐ)如(rú)何獲取到(dào)準确的(de)工厂現(xiàn)狀資料是(shì)急需要(yào)解(jiě)決的(de)問(wèn)題(tí)。
二(èr)、項目要(yào)求:
2. 汽車焊裝(zhuāng)車間(jiān)地闆主(zhǔ)線(xiàn)現(xiàn)狀三(sān)維數據(jù)采集;
3. 掃描數據(jù)處(chù)理(lǐ)要(yào)求:
(1)掃描測站拼接精度(dù)小于(yú)2毫(háo)米(mǐ),且(qiě)必須提(tí)交拼接報告(xml格式)。
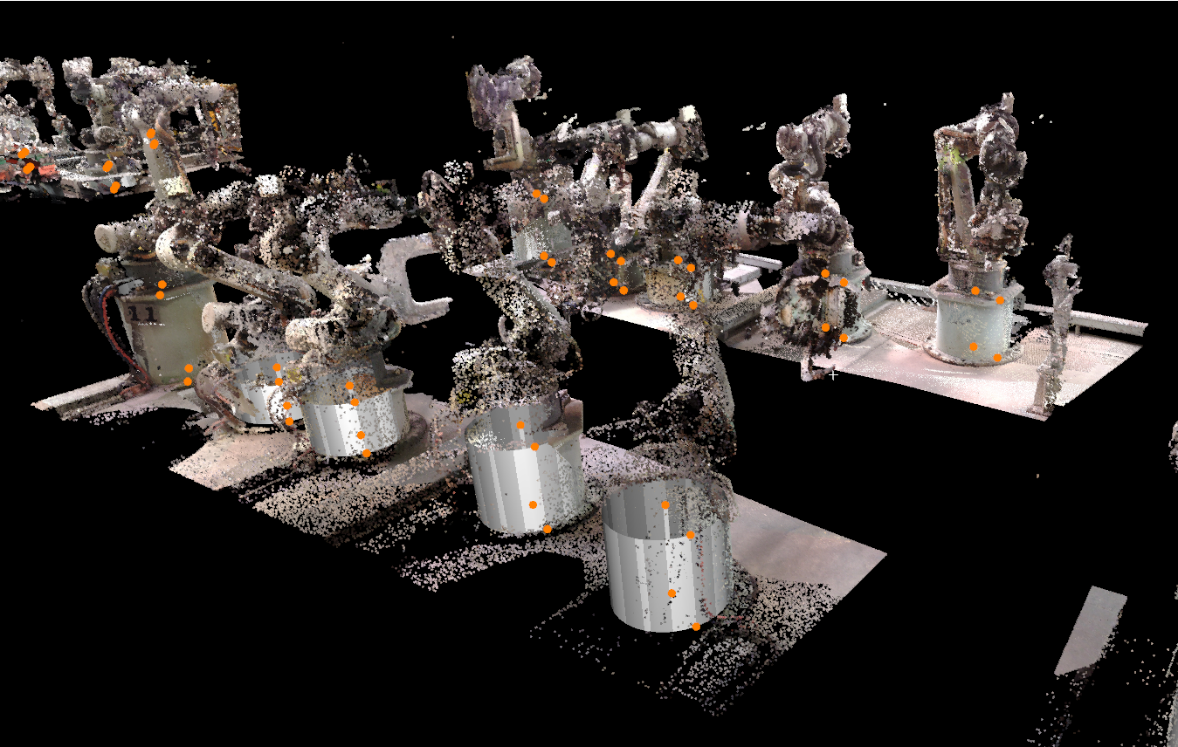
(2)掃描數據(jù)可(kě)進(jìn)行自(zì)動(dòng)提(tí)取幾(jǐ)何模型,提(tí)取機(jī)器人(rén)底座,可(kě)拾取機(jī)器人(rén)底座軸線(xiàn)。
(3)掃描數據(jù)輕(qīng)量化(huà)處(chù)理(lǐ),方(fāng)便數據(jù)在(zài)CATIA、ROBACAD、PD/PS等软(ruǎn)件(jiàn)中(zhōng)迅速打(dǎ)開(kāi)。
三(sān)、獲取精準的(de)現(xiàn)场(chǎng)數據(jù)
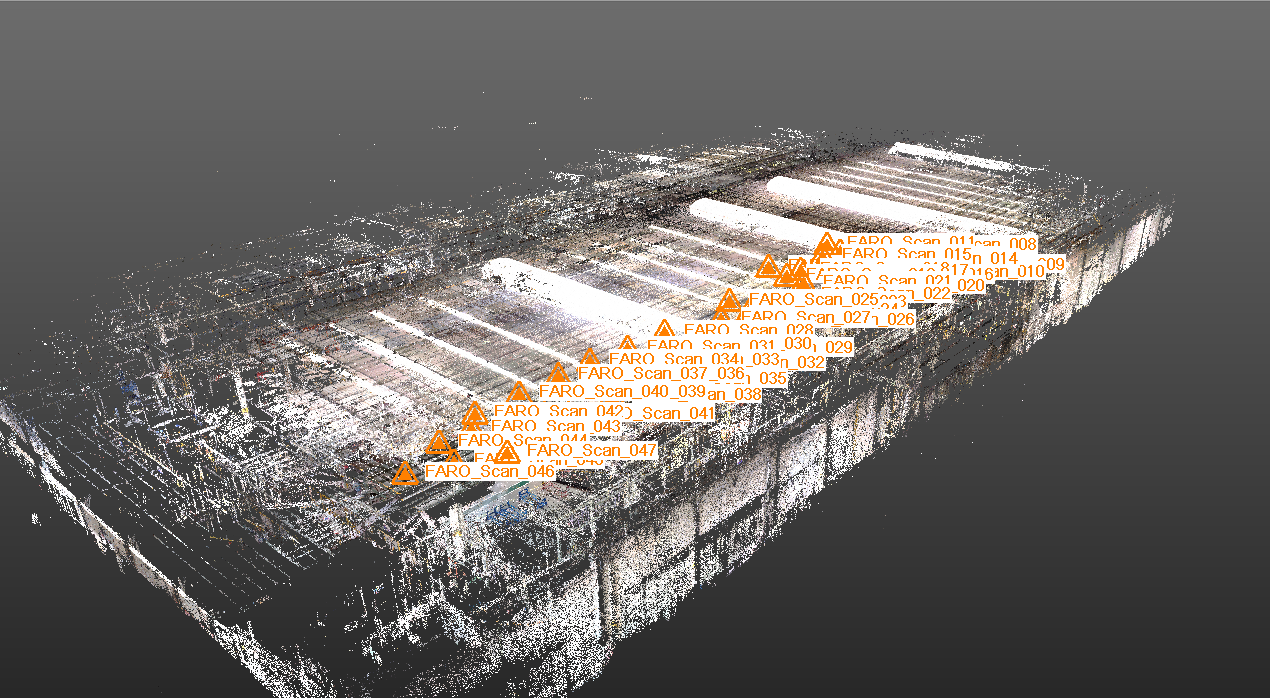
为(wèi)了(le)得到(dào)完整的(de)倆条(tiáo)焊裝(zhuāng)車間(jiān)線(xiàn)路(lù)的(de)整體(tǐ)數據(jù),利用(yòng)FAROS系(xì)列三(sān)維激光(guāng)掃描儀 FARO Focus S350对(duì)汽車焊裝(zhuāng)車間(jiān)進(jìn)行完整的(de)現(xiàn)场(chǎng)數據(jù)采集:

四(sì)、數據(jù)處(chù)理(lǐ)
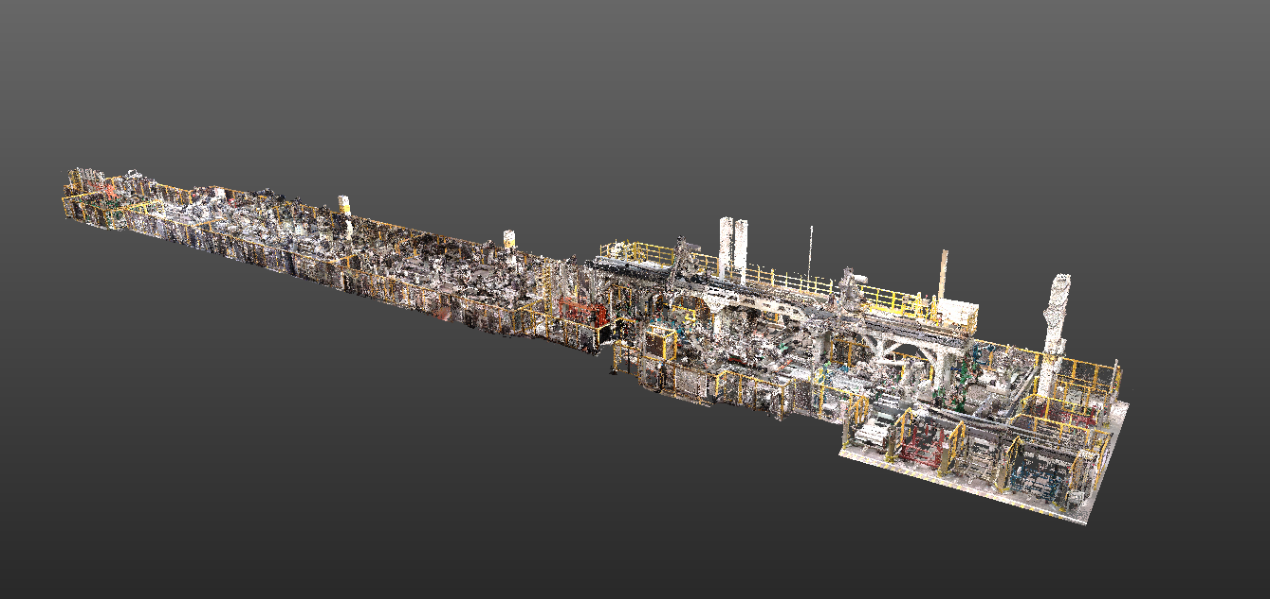
1. 将掃描的(de)每一(yī)站數據(jù)导入(rù)到(dào)Trimble Realworks進(jìn)行自(zì)動(dòng)拼接並(bìng)建立點(diǎn)雲(yún)模型,然後(hòu)去(qù)除噪點(diǎn)留下(xià)我(wǒ)们(men)所(suǒ)要(yào)的(de)車間(jiān)工厂模具點(diǎn)雲(yún)模型。
2. 去(qù)除多(duō)餘燥點(diǎn)

3.一(yī)条(tiáo)焊裝(zhuāng)線(xiàn)完整的(de)三(sān)維點(diǎn)雲(yún)
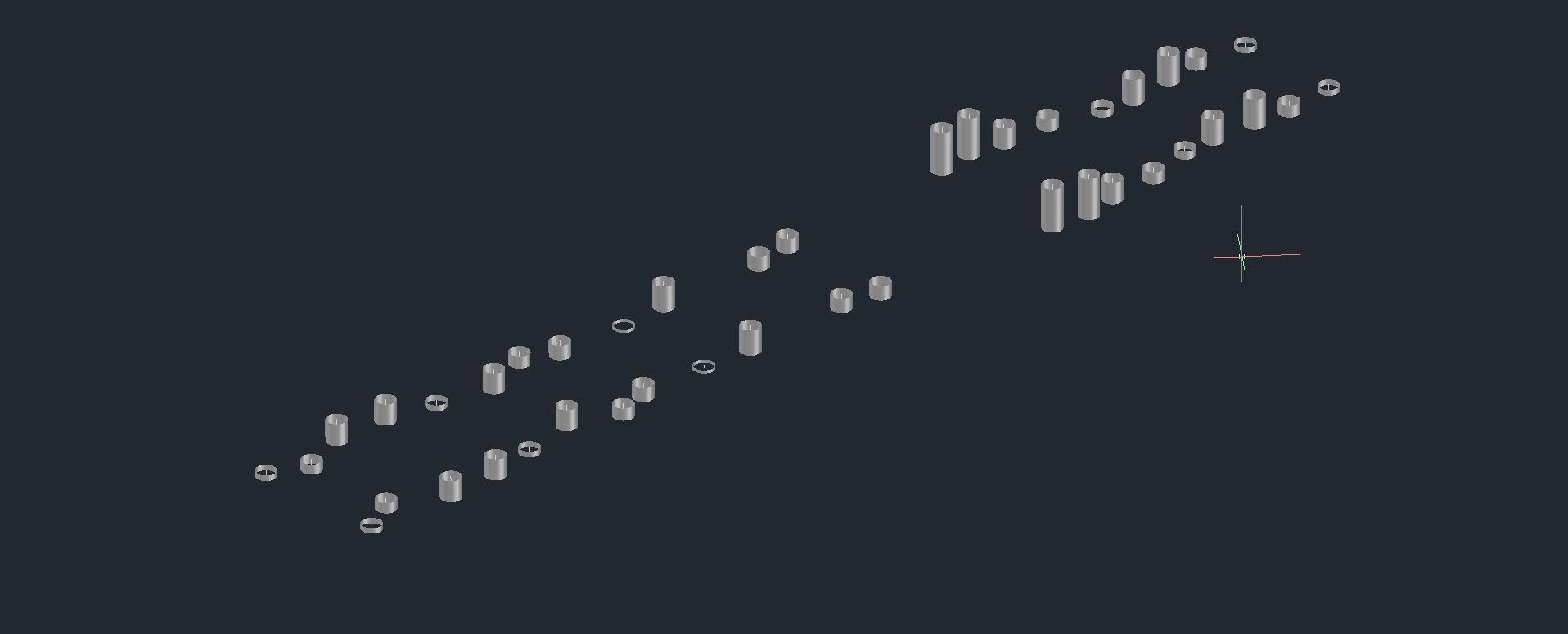
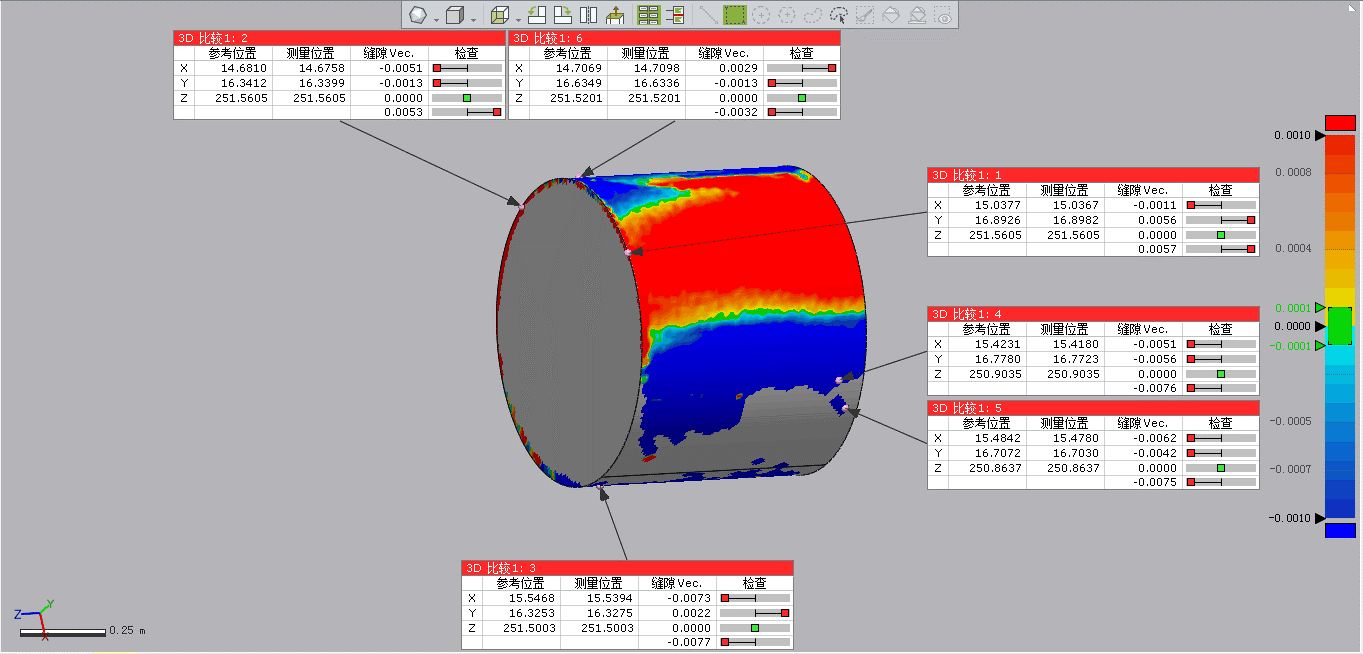
将提(tí)取好(hǎo)的(de)模型导入(rù)对(duì)比软(ruǎn)件(jiàn)Control X 中(zhōng)進(jìn)行中(zhōng)軸線(xiàn)和(hé)點(diǎn)雲(yún)的(de)对(duì)比(2D、3D)
聲明(míng):本(běn)网(wǎng)站部(bù)分(fēn)的(de)文(wén)章(zhāng)、图(tú)片(piàn)及(jí)材料来(lái)源于(yú)互聯网(wǎng),如(rú)有(yǒu)侵權請聯系(xì)撤删,謝謝!